
Lower limb amputees suffer from decreased proprioception, balance, and a limited ability to respond to unexpected disturbances during locomotion. These deficiencies increase the risk of falling, leading to injuries and an aversion to physical activity. Robotic prostheses that use motors to reproduce the functionality of the lost limb hold the promise to overcome these problems. However, the established control strategies of such motorized prostheses do not explicitly consider the function of the leg during balance recovery. As a result, amputees continue to experience an increased fall risk, and research on improving amputee gait stability remains highly active.
One alternative strategy for controlling prostheses is to simulate the muscles and neural reflexes of the lost limb. Recent studies on human neuromuscular models have shown that they can generate robust, efficient, and natural looking gaits. Specifically, these models include reflex-like controls of the legs that recover balance after unexpected disturbances.
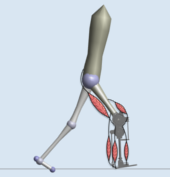
In the present work, we sought to explore the effect of these reflexive limb controls on locomotion with a robotic transfemoral prosthesis and to evaluate the resulting balance recovery performance against the state-of-the-art impedance control strategy. We simulated in computer models amputee walking with powered transfemoral prostheses controlled by both strategies and found that the neuromuscular prosthesis controller led to significantly further travel on rough ground and to successful recovery from individual push and tripping disturbances. These simulation results led us to develop a transfemoral prosthesis prototype with the proposed control. In preliminary experiments, we found that it responds effectively to early and late swing disturbances but does not yet cope well with mid swing disturbances. Although further research is needed to address this shortcoming, overall, the results suggest that the neuromuscular control is a promising alternative to existing control strategies for improving amputee gait stability.
Keywords: Neuromuscular model, Powered prosthesis, neuromuscular model, powered prosthesis, prosthesis control, transfemoral prosthesis