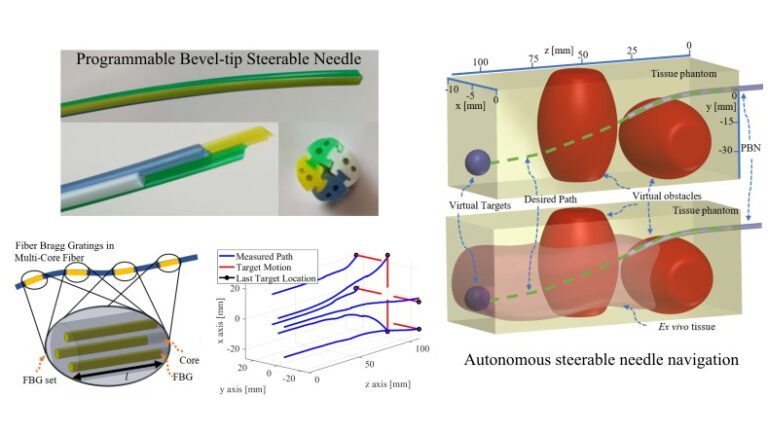
3-D Path-Following Control for Steerable Needles with Fiber Bragg Gratings in Multi-Core Fibers
https://www.embs.org/tbme/wp-content/uploads/sites/19/2023/02/TBME-00423-2022-Website_Image.jpeg
789
444
IEEE Transactions on Biomedical Engineering (TBME)
//www.embs.org/tbme/wp-content/uploads/sites/19/2022/06/ieee-tbme-logo2x.png
This is the first study to demonstrate the safety and performance benefits of fiber Bragg gratings in multi-core fibers for autonomous steerable needle navigation, implemented here within a biologically inspired neurosurgical system.
read more