
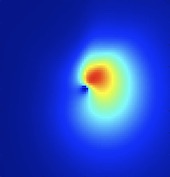
One of the primary objectives of cancer intervention is the selective removal of malignant cells while conserving surrounding healthy tissues. However, the accessibility, size and shape of the cancer can make achieving appropriate margins a challenge. A minimally invasive treatment option for these clinical cases is interstitial needle based therapeutic ultrasound (NBTU). In this work, we develop a finite element model (FEM) capable of simulating continuous rotation of a directional NBTU applicator. The developed model was used to simulate the thermal deposition for different rotation trajectories. The actual thermal deposition patterns for the simulated trajectories were then evaluated using magnetic resonance thermal imaging (MRTI) in a porcine skin gelatin phantom. An MRI-compatible robot was used to control the rotation motion profile of the physical NBTU applicator to match the simulated trajectory. The model showed agreement when compared to experimental measurements with Pearson correlation coefficients greater than 0.839 when comparing temperature fields within an area of 12.6mm radius from the ultrasound applicator. The average temperature error along a 6.3mm radius profile from the applicator was 1.27oC. The model was able to compute 1s of thermal deposition by the applicator in 0.2s on average with a 0.1mm spatial resolution and 0.5s time steps. The developed simulation demonstrates performance suitable for real-time control which may enable robotically actuated closed-loop conformal tumor ablation in future work.