
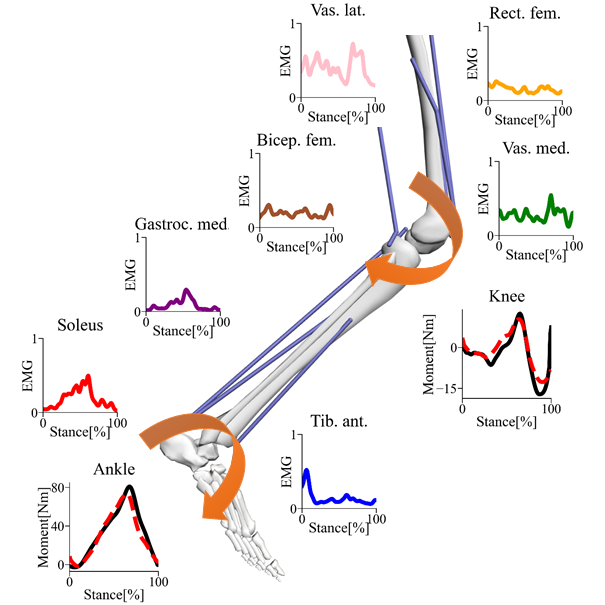
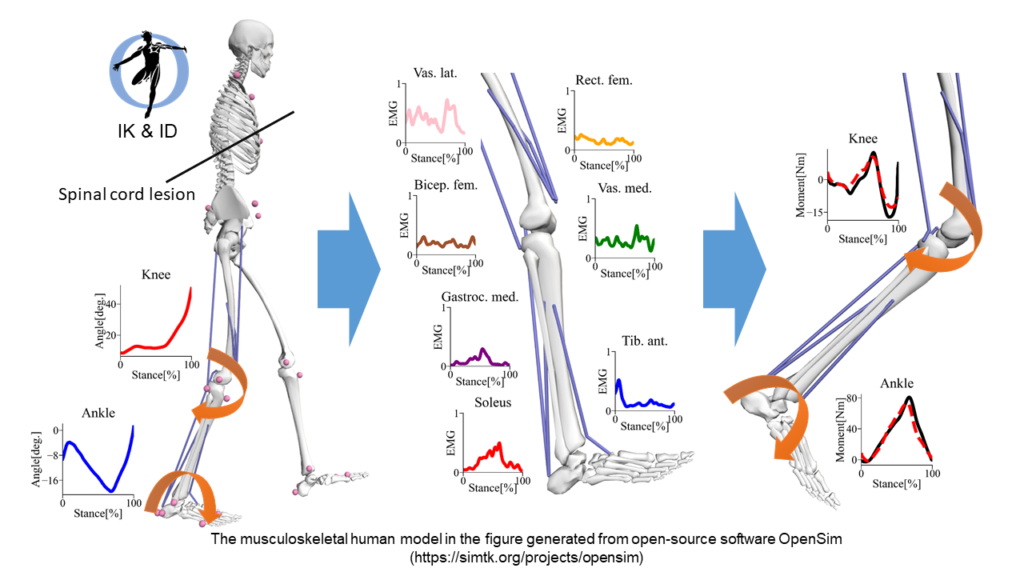
EMG-driven neuromusculoskeletal (NMS) modelling approaches have been developed to estimate user-intended joint moments. This study proposes intramuscular EMG-driven NMS modelling as a control method applied to recordings from muscle implants with the long-term goal of applications in assistive exoskeletons for spinal cord injury (SCI) patients. We used both surface EMG (sEMG) and intramuscular EMG (iEMG) measurements to estimate the performance of iEMG driven NMS model’s joint torque prediction compared to the baseline reference. The approach was applied to estimate ankle and knee joint torques from iEMG and sEMG signals recorded unilaterally from 7 leg muscles in both healthy individuals and incomplete SCI patients. The results showed that the correlation between experimental and predicted joint torques was similar when using iEMG or sEMG as input to our model. These results show that iEMG can be used as a potential input for NMS model-based joint torque estimation, with performance similar to that of sEMG. The advantage of using invasive technology as a source of control of external devices, such as exoskeletons or prostheses, is that it may be applied as a chronic interface, as it has been shown in prosthesis control. In our study we used non-selective fine wires for recording iEMG. These recordings have similar selectivity to chronically implanted devices and can be easily implanted for acute experiments. In conclusion, the results of this study indicate the potential use of recordings from muscle implants as a reliable input for human-machine interfaces.