
Hossein Sadjadi, Keyvan Hashtrudi-Zaad, and Gabor Fichtinger
Volume 60, Issue 10, Page:2706-2715
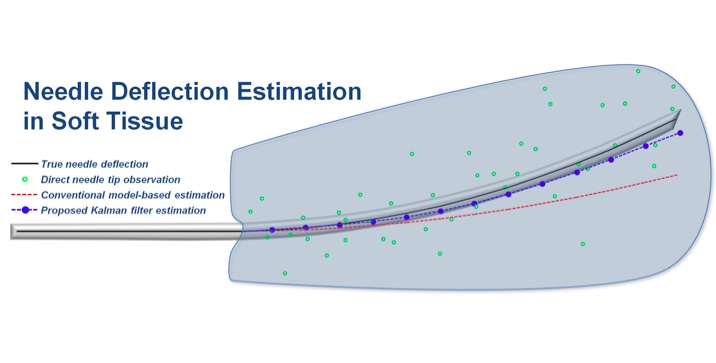
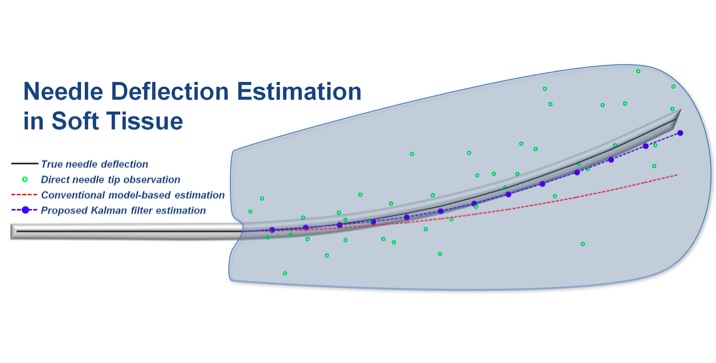
Many diagnostic and therapeutic interventions require accurate needle placement. However, complex behavior of the needle within biological tissue poses a major challenge, particularly when deflection of the needle causes targeting error. Accurate estimation of needle deflection can help compensate for placement errors before and during insertion. Numerous mechanical models have been proposed to estimate needle deflection in soft tissue. However, these models perform rather poorly in clinical circumstances, as they demand precise prior quantification of the deflection model parameters, including tissue properties, which is not feasible in clinical settings. We suggest that the effect of parameter quantification uncertainty can be mitigated by integrating some position measurements taken directly from the needle. We use Kalman filters to combine a kinematic needle deflection model with the position measurements of the needle base and tip taken by electromagnetic trackers. One position sensor is installed on the needle base and estimates the needle tip position indirectly using the kinematic needle deflection model. Another position sensor is installed on the needle tip and estimates the needle tip position through direct, but noisy and imprecise measurements. Kalman filters are then employed to fuse the position measurements with the deflection model to provide an accurate real-time estimate of the needle tip position. We implemented this method to compensate for needle deflection during simulated needle insertions and performed sensitivity analysis for plausible intra-operative conditions. We observed a reduction of needle tip estimation error in the range of 28% to 74%, when compared to purely model-based estimation. These results suggest potential clinical applicability in the guidance of needle placement medical interventions.