

Microrobots have been actively investigated in the area of biomedical applications, such as precise targeted therapy. The real-time in vivo visualization of microrobots represents a challenging problem in the aforementioned biomedical applications. To date, various bioimaging methods for monitoring microrobot motion in living organisms, including magnetic resonance imaging (MRI), ultrasonic imaging, and computed tomography (CT), have been proposed.
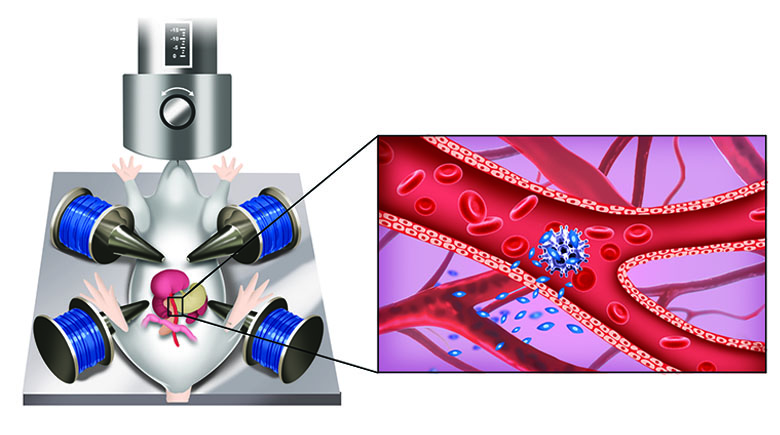
This paper presents the in vivo navigation of magnetic microrobots using OCT imaging technology, which is selected because of its advantages of high imaging resolution, compatibility with magnetic field actuation, and acceptable imaging depth. A gradient magnetic field actuation platform is established in the City University of Hong Kong to navigate the microrobots. The generated magnetic field is mathematically modeled and serves as the basis of a closed-loop controller with OCT imaging feedback that is developed to navigate microrobots along the desired trajectory. In the experiments, microrobots are actuated in thin tubes filled with three types of fluid, namely, normal saline, gastric juice, and mouse urine. Subsequently, in vivo experiments are performed in the portal vein of mice. Microrobots can be detected and actuated successfully by utilizing OCT imaging feedback. The OCT imaging method exhibits satisfactory properties, including real-time imaging, compatibility with the gradient magnetic manipulation system, high imaging resolution, and minimum harm to the body, compared with previous imaging methods. On the basis of the OCT imaging feedback, a controller is further developed to achieve the in vivo navigation of microrobot.
Besides, OCT imaging technology can also be combined with endoscopic technology and used in several organ systems, such as the cardiovascular, digestive, respiratory, and reproductive systems, showing the fascinating application prospects.