
Steerable needle-based surgical navigation has been widely researched as it offers the potential to improve the delivery of diagnostic and therapeutic agents thanks to the ability to avoid critical anatomical structures along the way to a target tissue. One of the main challenges to date has been the autonomous navigation of steerable needles along predefined curvilinear trajectories, as it is not possible to infer the tip position from needle base measurements. With the advent of fiber Bragg grating (FBG)-based localization techniques, needle shape reconstruction, which is essential for closed-loop motion control, has become possible, offering a flexible sensor technology, which is immune to electromagnetic interference and does not require line of sight.
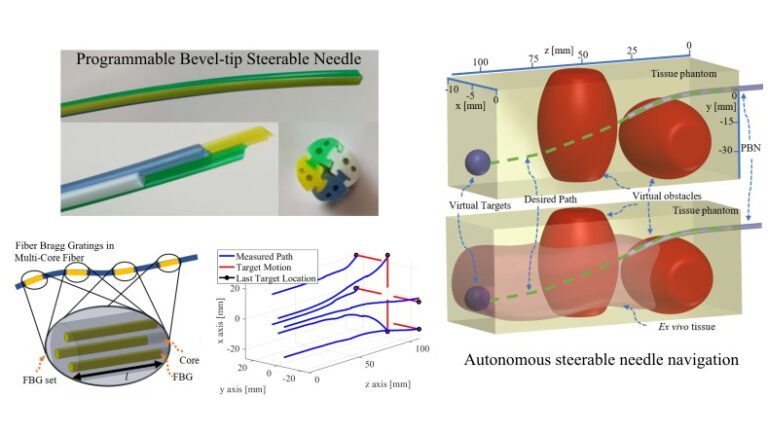
In our paper, we present a novel approach for closed-loop steerable needle navigation based on Active Disturbance Rejection Control (ADRC) and Nonlinear Guidance Law (NLGL). To the best of our knowledge, this is the first study investigating path-following control methods of steerable needles employing multicore fibers (MCFs) with FBGs. In addition, this is the first experimental 3-D path-following study of our bioinspired needle, a Programmable Bevel-tip steerable Needle (PBN), which was inspired by wasps. Since it enables efficient path-following control and target-hitting performance in cases including moving targets, our paper offers new insights into the autonomous navigation of these novel devices. In addition, we show that the path to be followed autonomously could be longer than the sensorized MCF length, which holds promise for lowering manufacturing costs and overcoming calibration difficulties for autonomous steerable needles.
We validated the approach with PBN experiments in both phantom tissue and ex vivo brain. The mean, standard deviation, and maximum absolute position errors were observed to be 1.79 mm, 1.04 mm, and 5.84 mm, respectively, for 3-D, 120 mm deep, path-following experiments, which confirm that FBGs in MCFs can be used to provide effective feedback in path-following controllers for steerable needles.