In 1988, a Scientific American article by A.K. Dewdney [1] on the work of nanotechnologist K. Eric Drexler spurred public interest in the nascent field of nanotechnology and its potential for advancing humanity into a new technological age. The article portrayed a world run by nanoscale machines that could operate in any environment (Figure 1), with uses ranging from fighting infections in the human body to building tomorrow’s skyscrapers. Nearly 30 years later, these visions of the future are closer than ever. Advances in microscopic imaging, nanobiotechnology, and collective control are ushering in the age of nanoscale robotics.
The “Nature” of Robots
The idea of robots emerged at the beginning of the 20th century. As is often the case in history, literary imagination preceded scientific fact; the word robot was first introduced by Czech author Karel Capek in the 1920s, when he described robots as mechanical laborers. After all, in his native language, robot is a derivative of the word that translates as work in English. The idea of robotics was further popularized with the works of Isaac Asimov and his Three Laws of Robotics, which first appeared in his 1942 short story “Runaround,” part of the I, Robot series.
Clearly, nearly a century after its conception, robotics is no longer confined to describing big, walking hunks of metal. Nowadays, robot is just an abstract term for sensors and actuators that interact with one another via a controller, all carried by a frame. The following four parts allow a robot to complete its required task.
- The actuator (or motor) allows the robot to move and manipulate its environment to serve a certain purpose.
- Sensors provide feedback on the progress of the task.
- The controller (perhaps the most important part of the robot) makes decisions by reading sensory input and then outputs the results in the form of modified actuation.
- Finally, the frame houses all these components in one place and protects them from inhospitable environments.
Devising Robots at Nanoscale
However, the smaller the robot, the harder it is to design. This is particularly true on the nanoscale. First of all, many mechanical engineering tools are not applicable when components are the size of tens or hundreds of nanometers. We cannot use rods, nuts, and bolts to hold things together, and we rarely have live imaging to receive immediate feedback on the system status. Second, we face the problem of the tyranny of numbers, an ongoing issue in engineering in which the large number of components involved prevents technological progress. The most prominent example (and the one that prompted the introduction of the term) was the large-scale integration of transistors in circuit boards in the 1950s. The problem was resolved by the invention of the integrated circuit, which removed the necessity of manipulating individual transistors.
Just as we need billions of transistors to make a processing unit, we will need billions of nanoscale robots to successfully complete tasks. However, the time required to create these one by one will be prohibitive. The answer to the large-scale production of nanobots is self-assembly, as biological cells so strikingly demonstrate.
Propulsion and Sensing
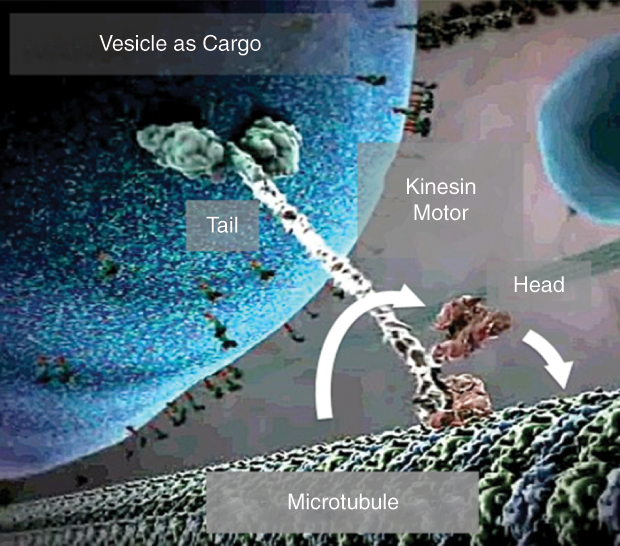
Within cells, self-assembled nanorobotic systems sense the need to transport specific cargos (such as vesicles, RNA molecules, and ribosomes) and, in response, load, transport, and deliver these cargos. One example of such a nanorobotic system is the combination of microtubules and kinesin motor proteins (Figure 2). Microtubules, micrometer-long cylindrical structures with a 25-nm diameter assembled from tubulin proteins, are part of the cytoskeleton and serve as rails for kinesin motor proteins. Kinesins pull cargo along the microtubules using adenosine triphosphate as fuel. In addition to converting chemical energy into mechanical work with a remarkable efficiency, sometimes exceeding 50%, kinesins sense and respond to the conditions in the cell in a complex manner. While Jean-Pierre Sauvage, J. Fraser Stoddart, and Bernard L. Feringa were recently awarded the 2016 Nobel Prize in Chemistry for their efforts to synthesize molecular motors, current artificial motors still have a long road ahead before they can compete with motor proteins in terms of efficiency and functionality.
In the meantime, engineers have pursued a hybrid approach, in which biological motors, such as kinesin and myosin, are integrated with synthetic components to take advantage of their respective strengths. Our own research has pursued the design of molecular shuttles, whereby surface-adhered kinesin motors propel cargo-bound microtubules within engineered environments (Figure 3) [2]. In fact, nanoscale sensing is frequently accomplished in biology by specific binding, and so our molecular shuttles utilize the outstanding specificity of receptor–ligand interactions. Specifically, we use antibody–antigen interactions as well as streptavidin–biotin bonds.
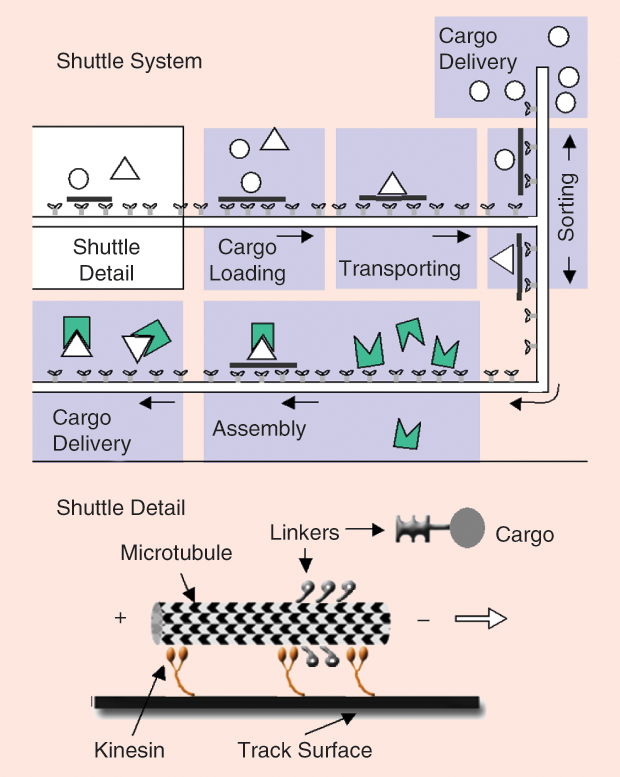
In nature, biotin, also known as vitamin B7, is an essential mineral for bacterial survival, while streptavidin is a protein found in the bacterium Streptomyces avidinii with a very strong binding affinity for biotin. Microtubules linked to biotin molecules selectively bind and transport cargo tagged with streptavidin. The payload can be unloaded by using even stronger bonds; for example, complementary DNA strands allocated between the cargo and microfabricated deposition sites on the surface could serve as cargo drop-off points. Cargo delivery could be transduced into a signal for the controller.
Controlling the Nanobots
The controller interconnects the sensors and motors. In biological nanorobots, control algorithms are encoded in the mechanics of the system as well as in chemical reaction networks. Sensing, control, and actuation are highly integrated, and the strategies that have evolved to give biological systems high performance, adaptability, and robustness are an active area of research. A particular challenge is that nanorobots will have to communicate and cooperate to accomplish a larger task. The solution likely lies in swarm behavior. At the macroscale, engineers at Harvard University have already built swarming Kilobots [3], thousands of centimeter-sized robots that function under a decentralized control system. By working together through local neighbor interactions, they successfully figure out how to solve a variety of problems and construct massive shapes. By employing a similar, decentralized control methodology on the nanoscale, we may be able to complete more elaborate tasks: where an individual nanorobot would fail, a swarm would succeed.
Rethinking the Frame
However, we can only expect nanorobots to perform such complex tasks if they have adequate protection from the nanoscale environment, where oxidative stress often results in detrimental chemical reactions. As a result, the frame protecting macroscale robots from the environment must be rethought for nanoscale robots. Biology solved the problem by using cells as miniature clean rooms, free of dust particles and with highly controlled chemical conditions. In this environment, each nanorobot does not need its own frame. Instead, nanorobotic systems can operate within the cell without rigidly defined boundaries. So far, engineered nanorobots often operate in microfluidic systems that partially replicate the intracellular environment. Nevertheless, the design of an optimal frame defining the boundary between the nanobot and its environment remains a conceptual problem.
Conclusions
With each day, advances in control, molecular detection, and nanoscale actuation bring us closer to a world enhanced by nanorobots. It will only be a matter of time until we will be thrust into a new era of technology, extending far beyond what A.K. Dewdney imagined in his 1988 article.
References
- A. K. Dewdney, “Computer recreations,” Sci. Amer., vol. 258, no. 1, pp. 100–103, Jan. 1988.
- H. Hess, “Engineering applications of biomolecular motors,” Annu. Rev. Biomedical Eng., vol. 13, pp. 429–450, Aug. 2011.
- M. Rubenstein, A. Cornejo, and R. Nagpal, “Programmable self-assembly in a thousand-robot swarm,” Science, vol. 345, no. 6198, pp. 795–799, Aug. 2014.