
A tiny cockroach no bigger than a large paper clip scurries across the floor of my bio-engineering lab at the University of Connecticut, Mansfield, CT, USA. It is a robot-roach hybrid, a hardwired biological insect, a cyborg if you will, and its future high-tech brethren may one day save your life. The use of insects as platforms for small robots has an incredible number of useful applications from search and rescue to national defense.
Surprisingly, cockroach robots aren’t new. Researchers have been exploring bio-robotic platforms for insects for the better part of the past decade. But building robotic systems at such miniature scale isn’t easy and the technology seems to work only about half the time. In a paper published at the 9th International IEEE EMBS Conference on Neural Engineering, San Francisco, CA, USA, 2019, we report the creation of a microcircuit that allows more reliable and precise control of robotic insect motion.
To improve control of the insect, our microcircuit incorporates a multiaxis inertial measurement unit that can detect the roach’s six degrees of free motion, i.e., its linear and rotational acceleration, as well as its compass heading, and the ambient temperature surrounding the creature. The latter feature was added because tests have shown that the temperature of the environment in which a roach is moving can affect how and where the insect moves. Roaches, for the record, are more likely to go for walks when it’s warm.
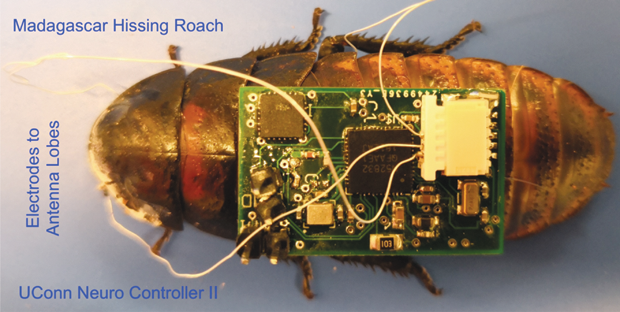
The microcircuit that we created can be strapped to the back of a cockroach (Figure 1). Wires from the device are attached to the insect’s antennae lobes. A tiny Bluetooth transmitter and receiver allows a nearby operator to control the roach’s movements remotely. Sending tiny electrical impulses to the nerve tissue in the insect’s right or left antenna lobe makes the insect believe it has encountered an obstacle in the respective direction. A small charge to the left antenna lobe makes the insect move away to the right. Likewise, a charge sent to the right antenna lobe makes the insect move left. It’s power steering redefined.
While other labs have developed similar control systems, UConn’s microcircuit is unique in that it offers operators a greater degree of control of the insect’s movement, real-time feedback of the insect’s neuromuscular response to artificial stimuli, and multichannel avenues for stimulating the insect’s nerve tissue. The result is a more informed and precise system of control. The UConn system’s microcontroller and built-in potentiometer lets operators vary the output voltage, frequency, and cycle of the stimuli sent to the insect (no roaches were hurt by these experiments by the way).
Most importantly, the system allowed users to use the real-time feedback sent over the Bluetooth system to set specific parameters for stimulating the insect’s antennae lobes and that allowed them to steer the insect in a desired direction. Our microcircuit provides a sophisticated system for acquiring real-time data on an insect’s heading and acceleration, which allows us to extrapolate its trajectory. We believe this advanced closed loop, model-based system provides better control for precision maneuvering and overcomes some of the technical limitations currently plaguing today’s microrobots.
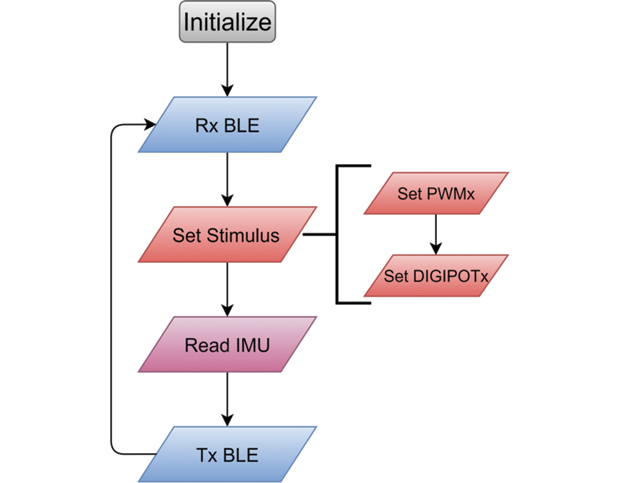
A highly modular proprietary software architecture, developed in our lab, lets us add and drop functionality over a highly optimized communication interface. In a first experiment, a carefully designed current/voltage trajectory is wirelessly transmitted to the controller, which is used to stimulate the brain and the resulting inertial measurements are transmitted. This is used to identify an abstract dynamic model of the neuromuscular pathway of the insect. A closed-loop model-based controller is then developed and coded that receives high-level trajectory commands, computes the necessary current/voltage injection, based on the measurement feedback, all in real time (Figure 2).
One interesting outcome that we noticed was that the roach’s movements left or right in response to artificial stimulation decreased in intensity after the initial stimulus. So, if the roach made a hard left after the first electronic pulse hit its right antenna lobe, its turn was less dramatic with each subsequent pulse to that lobe. While the new microcircuit is certainly a step forward for biological microrobotic technology, we do acknowledge that much more research needs to be done. Insect-driven bio-bots, you might say, are still in their larval stage. Ongoing advances in microhardware design and microcontrol systems could lead to a new generation of devices that work even better.
Acknowledgments
This work was supported in part by a UConn Startup Grant, and in part by the United Technologies Corporation—Institute of Advanced Systems Engineering.