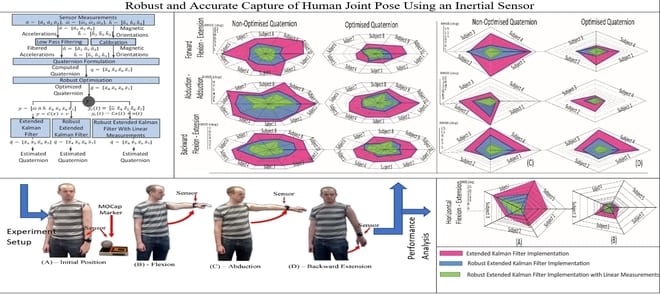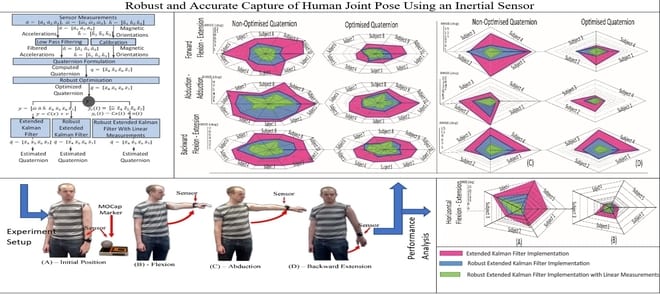
Wearable inertial measurement units (IMU) measuring acceleration, earth magnetic field, and gyroscopic measurements can be considered for capturing human skeletal postures in real time. Number of movement disorders require accurate and robust estimation of the human joint pose. Though these movements are inherently slow, the accuracy of estimation is vital as many subtle moment patterns, such as tremor are useful to capture under many assessments scenarios. Also, as the end user is a patient with movement disabilities, the practical wearability aspects impose stringent requirements such as the use of minimal number of sensors as well as positioning them in conformable areas of the human body; particularly for longer term monitoring. Estimating skeletal and limb orientations to describe human posture dynamically via model-based approaches poses numerous challenges. In this paper, we convey that the use of measurement conversion ideas-a representation signifying a linear characterization of an inherently non linear estimation problem, pragmatically improves the overall estimation of the limb orientation. A quaternion, as opposed to the Euler angle-based approach is adopted to avoid Gimbal lock scenarios. We also lay a systematic basis for quaternion normalization, typically performed in the pre-filtering stage, by introducing an optimization-based mathematical justification. A robust version of the extended Kalman filter is configured to amalgamate the underlying ideas in enhancing the overall system performance while providing a structured and a comprehensive approach to IMU-based real time human pose estimation problem, particularly in a movement disability capture context.