
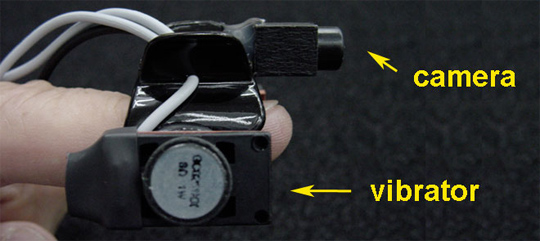
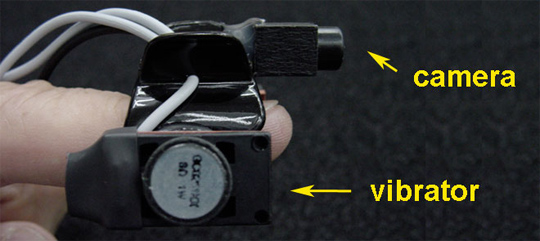
We present a novel device mounted on the fingertip for acquiring and transmitting visual information through haptic channels. In contrast to previous systems in which the user interrogates an intermediate representation of visual information, such as a tactile display representing a camera generated image, our device uses a fingertipmounted camera and haptic stimulator to allow the user to “feel” visual features directly from the environment. Visual features ranging from simple intensity or oriented edges to more complex information identified automatically about objects in the environment may be translated in this manner into haptic stimulation of the finger. Experiments using an initial prototype to trace a continuous straight edge have quantified the user’s ability to discriminate the angle of the edge, a potentially useful feature for higher levels analysis of the visual scene.
View full article