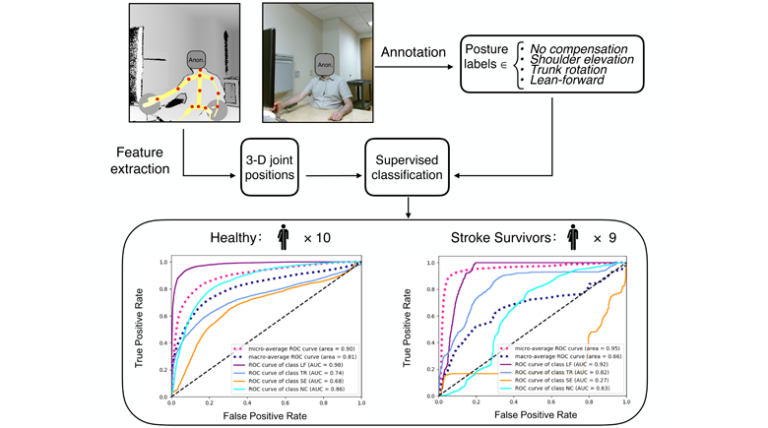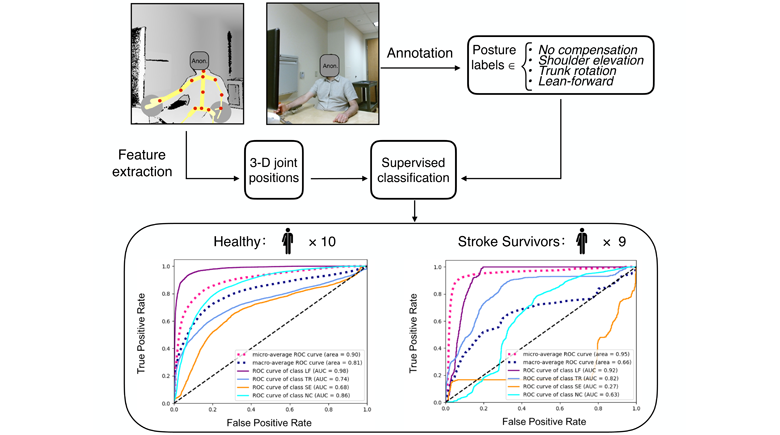
Robotic stroke rehabilitation therapy can greatly increase the efficiency of therapy delivery. However, when left unsupervised, users often compensate for limitations in affected muscles and joints by recruiting unaffected muscles and joints, leading to undesirable rehabilitation outcomes. This paper aims to develop a computer vision system that augments robotic stroke rehabilitation therapy by automatically detecting such compensatory motions. Nine stroke survivors and ten healthy adults participated in this study. All participants completed scripted motions using a table-top rehabilitation robot. The healthy participants also simulated three types of compensatory motions. The 3-D trajectories of upper body joint positions tracked over time were used for multiclass classification of postures. A support vector machine (SVM) classifier detected lean-forward compensation from healthy participants with excellent accuracy (AUC = 0.98, F1 = 0.82), followed by trunk-rotation compensation (AUC = 0.77, F1 = 0.57). Shoulder-elevation compensation was not well detected (AUC = 0.66, F1 = 0.07). A recurrent neural network (RNN) classifier, which encodes the temporal dependency of video frames, obtained similar results. In contrast, F1-scores in stroke survivors were low for all three compensations while using RNN: lean-forward compensation (AUC = 0.77, F1 = 0.17), trunk-rotation compensation (AUC = 0.81, F1 = 0.27), and shoulder-elevation compensation (AUC = 0.27, F1 = 0.07). The result was similar while using SVM. To improve detection accuracy for stroke survivors, future work should focus on predefining the range of motion, direct camera placement, delivering exercise intensity tantamount to that of real stroke therapies, adjusting seat height, and recording full therapy sessions.