Robotic rehabilitation systems have been developed to treat these musculoskeletal conditions, but limited availability prevents most patients from using them. The objective of this research was to create a home-use robotic rehabilitation system.
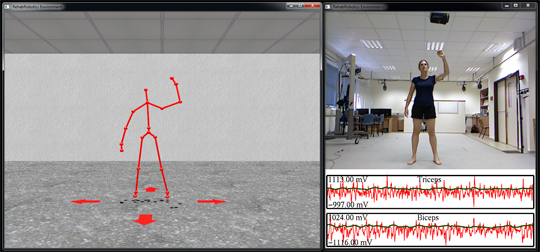
Data was obtained in real-time from a Microsoft Kinect™ and a wireless surface EMG system. Results from the Kinect™ sensor were compared to a standard motion capture system. A subject completed visual follow exercise tasks in a 3D visual environment. Data from two training exercises were used to generate a neural network, which was then used to simulate the subject’s individual performance. The subjects completed both the exercise task output from the neural network (custom), and the unmodified task (standard). Additionally, a wearable arm robot prototype was built. Basic system identification was completed, and a control algorithm for the robot based on pressure control was designed and tested.
The subjects had greater RMSE for position and velocity variables during the custom exercise tasks. These results suggest that the custom task was difficult to complete, possibly because the neural network was unconstrained. Finally, the robot prototype was able to mimic changes in a subject’s elbow angle in real-time, demonstrating the feasibility of the robotic rehabilitation system.