
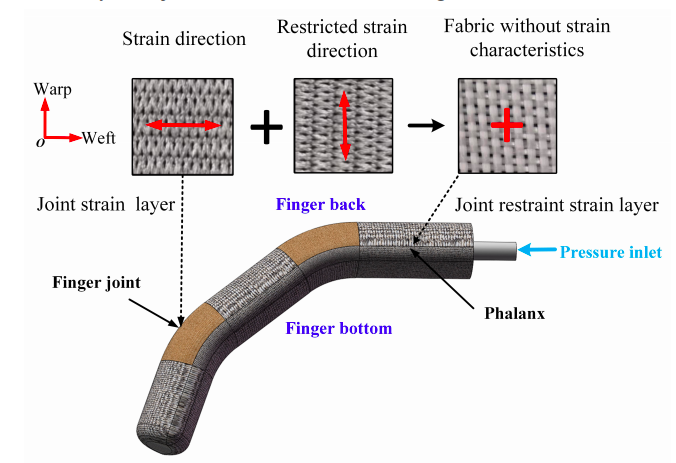
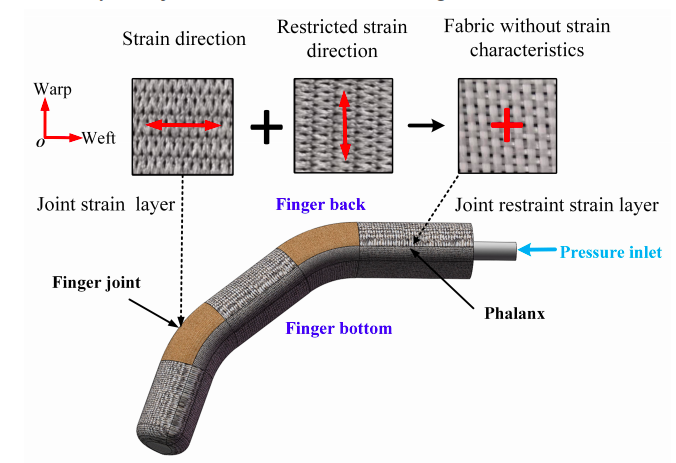
A kind of wearable exoskeleton soft rehabilitation glove is proposed for the dementia in Parkinson’s disease (PD) patients with loss of hand function, limited range of motion, and insufficient finger muscle strength to carry out rehabilitation exercise training in a passive or auxiliary way. A novel soft joint structure based on composite fabric material is introduced for the design of the soft glove with bionic method, and experiments are conducted to verify the effeteness of the proposed soft rehabilitation glove. The test results showed that when the fluid pressure was 0.42 MPa, the joint angle of MCP, PIP and DIP could be up to 81°, 98°, 72°, and produce output torque of 1.18Nm, 1.44Nm and 1.82Nm respectively, which meets the requirements of the hand rehabilitation. A dynamic rehabilitation-training test of the rehabilitation glove was also carried out, and the results showed that the movement frequency of soft fingers could reach 30 times/min, which is sufficient for repetitive flexion/extension exercise. In order to verify the grasping characteristics of the soft glove for irregular objects, experiments were carried out. The experimental results showed that the bionic soft glove was dexterous in grasping, which conforms to the universal grasping characteristics of human hands, has the function of assisting daily life (ADL), and meets the requirements of rehabilitation.