
A.Mannini, V. Genovese, and A. Maria Sabatini
The evaluation of gait phases is usually restrained to clinical facilities where motion capture systems are installed. The use of wearable sensor based methods could move these studies to everyday life. To do so, the accuracy of wearable systems for gait segmentation across different users has to be improved, and the methods have to work online, giving immediate feedback to the user.
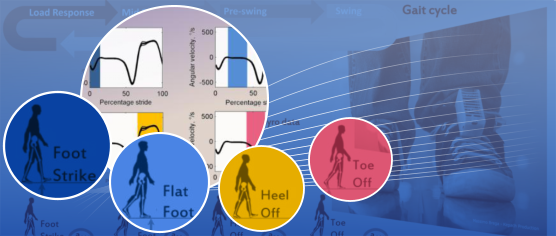
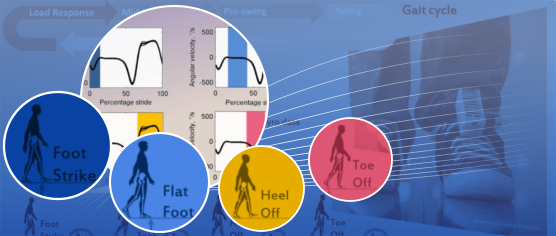
We present an approach to the online implementation of a gait event detector based on machine learning algorithms. An Android smartphone was used as the interface with the sensing node. Gait events were detected using a uniaxial gyro that measured the foot instep angular velocity in the sagittal plane to feed a four-state left–right hidden Markov model (HMM). The short-time Viterbi algorithm was used to overcome the limitation of the standard Viterbi algorithm, which does not allow the online decoding of hidden state sequences. Supervised learning of the HMM structure and validation with the leave-one-subject-out method were performed using treadmill gait reference data from a motion capture system. The four gait events were foot strike, flat foot (FF), heel off (HO), and toe off. The accuracy ranged, on average, from 45 ms (early detection, FF) to 35 ms (late detection, HO); the latency of detection was less than 100 ms for all gait events but the HO, where the probability that it was greater than 100 ms was 25%. Overground walking tests of the HMM-based gait event detector were also successfully performed.
Tags: Gait event detection, gyroscope, hidden Markov model (HMM), human movement analysis, short-time Viterbi (STV)